


Az AGV és az AMR egyre összetettebbé válik
Az Ipar 4.0 és az Intralogisztika 4.0. megváltoztatja a termelési környezetet, és ezáltal hatással van az AGV-kre (Automated Guided Vehicles – automatizált irányított járművek) és az AMR-ekre (Autonomous Mobile Robots – autonóm mobil robotok).
Markus Fenn és dr. Stefan May professzor lehetővé szerette volna tenni, hogy az iparág gyors és költséghatékony fejlesztések révén lépést tartson a trendekkel. Ezért kifejlesztettek egy Eduard nevű oktatási és prototípuskészítési platformot, amely alkalmas lehet az aktuális trendek leképezésére.
BS: Hogyan alakították ki a robotplatformjukat?
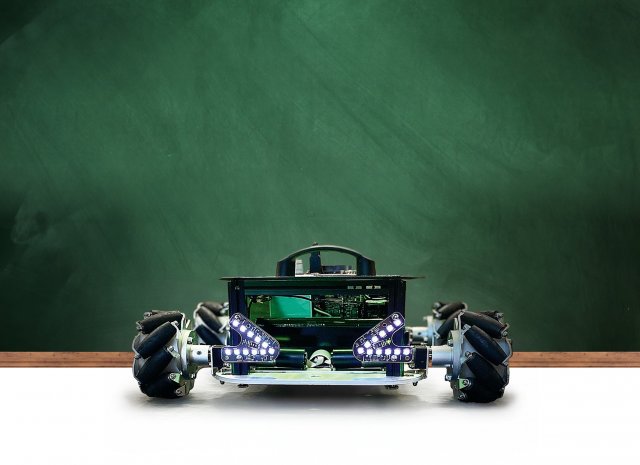
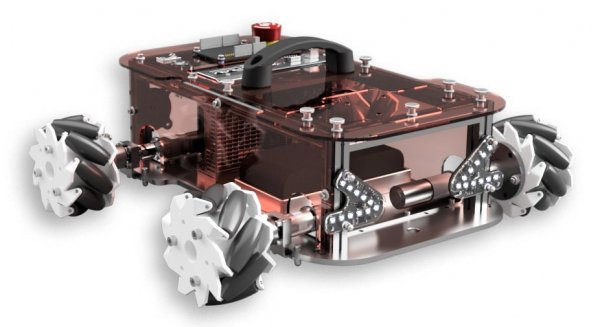
Markus Fenn: A robot neve Eduard. Nagyjából 40 x 40 x 15 cm méretű, és közel 8 kg a súlya. A robot ötlete azért merült fel, mert egy vállalat konzultálni szeretett volna egy hasonló kérdésről Stefan May professzorral. Szükségük volt egy platformra, ahol tájékoztatást és képzést biztosíthatnak a munkavállalóknak a mobil robotikáról. Az EduArt Robotik GmbH kínálatában ennélfogva a robotplatform mellett különféle oktatási és szolgáltatási lehetőségek is megtalálhatók teszteléshez és optimalizáláshoz.
A platform a Mecanum kerekek mellett egyszerű gumiabroncsokat is kínál. A Mecanum kerekek lehetővé teszik a robot számára, hogy helyben megforduljon, valamint oldalirányba vagy átlósan haladjon. Ez rendkívül szűkös terekben is elősegíti a pontos pozicionálást és navigálást. A gumiabroncsokat főként külső helyszíneken zajló tesztelésre vagy a mentési robotoka területén alkalmazzák, de egyelőre csak fiktív szituációkban. A FAULHABER kiváló minőségű motorjai mindkét alkalmazáshoz ideálisak.

BS: Mi teszi egyedivé az Önök robotplatformját?
Markus Fenn: A platform nyílt interfészeket, beépített, távolság- és tehetetlenségmérésre szolgáló eszközöket tartalmazó, integrált érzékelőkoncepciót, valamint egy beépített akkumulátorkezelési rendszert (battery management system, BMS) foglal magában. Az ügyfelek kérésére bővíthető az alapberendezés. Ezzel az ügyfelek minket bízhatnak meg, vagy akár saját maguk is elvégezhetik a bővítést. Ez lehetővé teszi az ügyfelek számára például azt, hogy kiválasszák a hajtás áttételi arányát (72:1 vagy 89:1) attól függően, hogy milyen sebességre vagy nyomatékra van szükség. Az ügyfelek így költséghatékonyan tesztelhetik az új elképzeléseiket. Emellett alkalmazásmegoldások bevezetésében is segédkezünk.
BS: Mennyire releváns az EduArt használata az iparágon belül?
Markus Fenn: Az AGV és az AMR egyre fontosabb szerepet tölt be az automatizálásban. A vállalkozások azonban sajnálatos módon javarészt igen tájékozatlanok. A robotplatform például lehetővé teszi egy új érzékelőrendszer gyors és egyszerű tesztelését. A platform lényegében szükség szerint bővíthető, ezért releváns ismeretek emelhetők be általa a termelés területére.

BS: Az AGV-k és az AMR-ek esetében a nagyobb fokú autonómia felé tendál az iparág. Egyfajta termelési alkotóelemmé „válnak”, és futószalagok helyett termelési modulokkal működnek. Az AGV-k és az AMR-ek tehát kényszerből működnek együtt. Képesek megérteni egymást?
Markus Fenn: Az AGV-k és az AMR-ek a szabványos VDA5050 interfésszel rendelkeznek, ezért kommunikálni tudnak a vezérlőközponttal. Az ügyfelek az Eduardhoz hasonló platformok használatával egyszerűen tesztelhetik az új szoftvereket, az eredményeket pedig egyedileg alkalmazhatják nagy méretű AGV-kre és AMR-ekre. Az alkalmazásokat ezért különösebb szimuláció nélkül lehet értékelni, hiszen a szoftverek lényegében nem változnak, akár az Eduardról, akár egy nagyobb rendszerről van szó. Egy digitális iker hasznos lehet a tervezéshez és a bővítéshez, és kérésre elérhető a platformon.
BS: Az Eduard hajtásrendszereinek emellett meg kell felelniük az AGV- és AMR-koncepciókra vonatkozó, jövőbeni követelményeknek is. Milyen hajtásrendszereket használnak a platformon, és miért ezekre esett a választásuk?
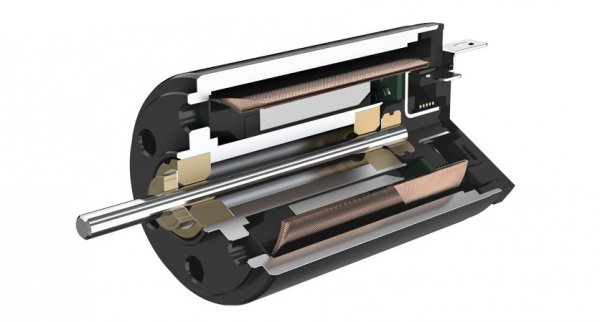
Markus Fenn: A képzési és PoC-platformunkon a FAULHABER nemesfém kommutátorral rendelkező egyenáramú mikromotorjait használjuk. Kis méretük ellenére komoly nyomatékot tesznek lehetővé, és rendkívül energiahatékonyak. Ezenkívül egyszerűen vezérelhetők, és ideálisak rendkívül pontos szabályozókörökhöz.
A nagyobb platformok esetében nagyobb méretű egyenáramú motorokat használunk ugyanattól a gyártótól. Ez elősegíti a gyors koncepcióigazolást, vagyis a megoldás egyszerűen vezérelhető például saját elektronikai berendezésekkel. Szükség esetén ezeket később BLDC-motorokkal helyettesítjük az alkalmazás esetében, mivel nem igényelnek karbantartást és tartósak.

BS: A termelésre hosszú ideje az egyre kisebb tételméretek és a nagyobb számú változatok jellemzők. Milyen hatással van ez a logisztikára, valamint az AGV-k és az AMR-ek funkcióira?
Markus Fenn: Kisebb terhelések kezelésére alkalmas robotokra van szükség. Ezek kisebb, de nagyobb teljesítményű hajtással rendelkező robotok. Ilyenek például a FAULHABER kitűnő minőségű hajtásrendszerei. Ezek az autonóm iparági tehergépkocsik kevesebb elektronikai berendezést és kisebb akkumulátorokat foglalnak magukban, így kisebb a súlyuk és az energiafogyasztásuk. Ha újra nagyobbak lesznek a terhelések, a megoldás egyszerűen skálázható, és egységként is képes működni. A robotok ugyanis a rendkívül precíz hajtásrendszereknek köszönhetően ütközésmentesen tudnak együttműködni.
BS: Ha több funkcióra van szükség, az nagyobb összetettséget kíván meg az AGV-ktől és az AMR-ektől. Mi számít észszerűnek és kivitelezhetőnek e tekintetben?
Markus Fenn: Az AGV-k és az AMR-ek esetében egyedül a szoftverek összetettek. A legfontosabb a tervezés, hogy az AGV-k zökkenőmentesen együtt tudjanak működni. Az AGV-knek a lehető legintelligensebbnek kell lenniük ahhoz, hogy ne csak felismerjék a raklapokat, hanem azt is lássák, hogy tele vannak, üresek vagy esetleg meg vannak döntve. Itt jön képbe a mesterséges intelligencia (MI). Az összetettség növekszik az MI használatával, és kis méretű robotunk ideális ennek a hatékony teszteléséhez.
BS: A nagyobb, automatizált flották szintén a trendek között említhetők. Ehhez pedig flottakezelésre van szükség.
Markus Fenn: A robotoknak ehhez interakciókat kell folytatniuk egymással, önállóan kell „gondolkodniuk”, megszokott felületeken keresztül kell adatokat cserélniük, és szükség esetén akár együtt is kell működniük. A szoftver az AGV/AMR méretétől függetlenül ugyanaz. A programok csak néhány kódsorban különböznek egymástól. A szoftvernek kevés információra van szüksége az AMR-ről. Ki kell például számítania, hogy hol tartózkodik a robot a termelési terület alaprajzán. Nem sok alkotóelembe vannak betáplálva a robot méretei, ám a navigáció ezek közé tartozik. A szoftver navigációs összetevője a méret alapján megkeresi a megfelelő útvonalat. A tesztelés azonban mindig rendkívül fontos. A mobil robotika ugyanis még gyerekcipőben jár, ezért nem dolgoztak még ki túlzottan sok szabványt.
A motorvezérlő a kívánt sebesség eléréséhez kiszámítja, mennyi kerékfordulatszámra lesz szükség. Ennek a módosítása három kódsort vagy egy konfigurációs fájlt igényel. A FAULHABER rendkívül pontos hajtóművel és jeladóval ellátott motorokat forgalmaz, amelyek precíz pozicionálást tesznek lehetővé. Ezek együtt gondoskodnak az optimális teljesítményről és biztonságról.
BS: Az Intralogisztika 4.0 / Ipar 4.0 hálózatba szervezett AGV-ket és AMR-eket kíván meg. Van-e lehetőség ezeknek a felhőn, sőt akár a peremhálózaton keresztüli működtetésére? Hogyan veszik számításba a biztonságot / a rendszerek esetleges feltörését ezeknél a forgatókönyveknél?
Markus Fenn: A rendszereket a gyártótól függően bizonyos mértékig „feltörhetetlenné” lehet tenni, ha elkülönítik a hardvereszközöket az internettől. A robotok biztonsági ellenőrző eszközökkel és távolságérzékelőkkel vannak ellátva, hogy ne menjenek neki a falnak. Ez azt jelenti, hogy a robot akkor sem végezhet veszélyes mozdulatokat, ha feltörik a rendszerét. Az, hogy a kezelt adatok mennyire vannak biztonságban a hálózaton belül, a vállalat hálózatától függ.
BS: Az Ipar 4.0 célja, hogy önszerveződő, heterogén, multimodális rendszerek jöjjenek létre. Ehhez adatcserére van szükség az AGV-k és az AMR-ek között, illetve a mesterséges intelligenciának és adatokra van szüksége. Milyen követelményeknek kell megfelelniük a FAULHABER alkotóelemeinek annak tudatában, hogy ezeknek szintén gyűjteniük és továbbítaniuk kell adatokat?
Markus Fenn: Erre a tevékenységre 5G-hálózaton vagy a vállalat belső WLAN-hálózatán kerül sor. A rendszereknek nincs szükségük valós idejű adatokra, ugyanis rendelkezésre állnak a tervezési szakaszból származó adatok. A rendszer például eléri az útvonalakat és a sebességeket az úttervezés során, és ezek nem változnak folyamatosan. Ha a robot egyik pontból a másikba halad, mindössze néhány másodpercenként van szükség életjelre. Emiatt kisebb az adatforgalom, ugyanis el kell kerülni a hálózatok túlterhelését. Az adatok egyesítése és értékelése az AMR rendszerén belül zajlik. A jeladók rögzítik a történéseket, és gondoskodnak a biztonságos vezérlésről a vezérlőkön keresztül.
BS: Mennyire biztonságosak az AGV-k és az AMR-ek?
Markus Fenn: Rendkívül biztonságosak. Ha valamelyik motorunk meghibásodik, a motorvezérlő észleli ezt, és leállítja a hajtásrendszert. Ha valaki belép a közlekedési területre, a lézeres érzékelő felismeri ezt, a rendszer pedig lefékez. Ez a két biztonsági szint elegendő.
BS: Milyen területeken van még szükség további kutatásra a későbbi AGV-k és AMR-ek kifejlesztéséhez, és hogyan fog módosulni a tesztelési platform az új követelményeknek megfelelően? Ezzel párhuzamosan egyre nagyobb a kereslet a hajtásrendszerek iránt. Milyen a jövő hajtásrendszere?
Markus Fenn: A robotoknak megfelelőbb hálózati összeköttetésben kell lenniük egymással. Négy robot működik együtt például egy közlekedési feladaton a következő mottó szerint: „sok kisebb robot jobb, mint egy nagy méretű”. Ehhez több kisebb robotra van szükség, amelyeknek abszolút pontossággal kell működniük. Ennek hiányában a robotflotta elakad vagy az egyes robotok nem lesznek szinkronban egymással. A jeladóknak a megbízhatóság fokozása érdekében teljes mértékben immunisnak kell lenniük az interferenciára, hogy a robotokra ne legyenek hatással a külső zavaró tényezők. A FAULHABER emiatt időnként két jeladót használ az egyes motorokon.
Ha számba vesszük többek között a FAULHABER különböző hosszúságú és átmérőjű hajtóműváltozatait, valamint a a jeladókat és a vezérlőket, 25 millió kombinációval állhatunk elő matematikailag. Ez igen figyelemre méltó eredmény, amelyet a FAULHABER már a gyakorlatban is megvalósított. Ez azt jelenti, hogy minden vállalat megtalálhatja a megfelelő hajtásrendszert, akár későbbi alkalmazásokhoz is.
Kapcsolódó cikkek
- Már a házhoz rendelt csomagokat is AI segítségével készíthetik össze Magyarországon
- Automatizálta hazai óriásraktárát a JYSK
- A robotok pontos és alkalmazkodóképes elektronikai gyártást biztosítanak
- A mezőgazdaság intelligens jövője
- A világ legtávolabbról vezérelt robotja automatizálja Amazónia újraerdősítési projektjét
- Az ABB és partnerei felújított robotokat ajándékoztak az Óbudai Egyetemnek
- A digitalizációhoz szükséges iparágnak is digitalizálnia kell
- Nem mindenkinek való a robotizáció, de nem lehet megkerülni
- Az ABB robotjai is beszállnak a COVID ellen folytatott küzdelembe
- A Valeo MiR robotokkal optimalizálja belső logisztikáját
Megoldás ROVAT TOVÁBBI HÍREI
Az AI és a fenntarthatóság területén nő az igény leginkább a munkavállalókra
A gyors technológiai fejlődés, a fenntarthatóság iránti fokozódó igény korszakában bizonyos munkaterületek jóval keresettebbé válnak. Az ezekkel a szakismeretekkel rendelkező munkavállalók iránti kereslet a magyar munkaerőpiacon is egyre növekszik. A Munkahelyeink.hu összegyűjtötte a kapcsolódó pozíciókat, illetve azt, hogy mire van szüksége a munkavállalóknak, hogy megszerezhessenek egy ilyen állást.