


A mesterséges intelligencia segítségével fejlődnek az együttműködő mobil robotok

Az autonóm mobil robotok (AMR-ek) az emberekkel együtt dolgozva hoznak létre magasan termékeny munkakörnyezetet, mely során átveszik az ismétlődő és balesetveszélyes, anyagmozgatással járó feladatokat. A mobil robotokat érintő eladások várhatóan világszerte jelentős mértékben emelkedni fognak az elkövetkező években, a földrajzi régiótól, valamint az iparágtól függetlenül. A folyamatos kutatás és fejlesztés sikerét mi sem bizonyítja jobban, mint az a számos, újonnan kialakított termék, amely egyre gyorsabb ütemben kerül a robotikai piacra. Az AMR-ek evolúciójának következő lépése a mesterséges intelligencia (MI) beépítése, mellyel az okos mobil robotok jóval többre lesznek képesek, mint eddig.
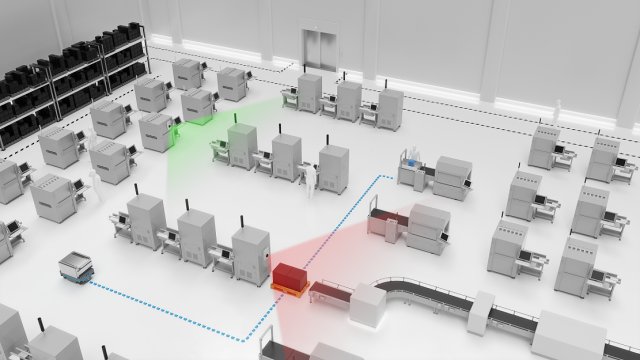
Ma a mobil robotok érzékelőket és szoftvert használnak a tájékozódáshoz (hogy meghatározzák, hova, és, hogyan mozogjanak) és az észleléshez (hogy megértsék, és reagálni tudjanak környezetükre). Az adatok integrált lézeres szkennerekből, 3D kamerákból, gyorsulásmérőkből, giroszkópokból, kerék jeladókból, és még sok más eszközből érkeznek, hogy minden egyes esetben a robot a lehető leghatékonyabb döntést hozhassa meg. Ezek a technológiák olyan képességekkel ruházzák fel az AMR-eket, amelyek az autóiparból lehetnek ismerősek, mivel fontos szerepet játszanak a mai modern autók kialakítása során. A robotok a leghatékonyabb útvonal kiválasztása után dinamikusan tájékozódnak és tisztában vannak a környezetükkel, így kikerülhetik az útjukba kerülő akadályokat vagy embereket, és automatikusan feltölthetik magukat, amikor arra szükség van. Az MI nélkül azonban a robotok minden típusú akadályra egyféleképpen tudnának csak reagálni.
Azzal, hogy a mesterséges intelligenciát a szoftverbe és a kiterjesztett érzékelőként működő, stratégiailag elhelyezett kamerákba építette - az AMR-ek piacának vezetője, - a Mobile Industrial Robots (MiR) lehetővé tette robotjai számára, hogy optimalizálják útvonaltervezésüket és a vezetés során tanúsított viselkedésüket. A kamerák segítségével a robotok észlelik és felismerik a különféle mozgó akadályokat, és ennek megfelelően reagálnak. Például, a robotok a megszokott módon folytatják tovább útjukat miután észleltek egy embert, de megállnak, ha egy önvezető járművel (AGV) találkoznak, hogy az AGV továbbhaladhasson. A robot az elzárt útvonalakat és nagy forgalmú helyeket is képes előre látni, így még azelőtt újratervezheti útvonalát, hogy a kérdéses területre érkezne. Amikor új, nem ismert tárggyal találkozik, a robot óvatos és figyelmes lesz. Először adatot gyűjt, majd ezután számítja ki a további találkozások során alkalmazandó optimális viselkedésmódot.
Az innovatív MI megoldás nagyobb hatékonyságot eredményez az útvonaltervezés és a környezettel való interakció során. A mesterséges intelligenciával a robotok hatásosan, és a megfelelő módon képesek reagálni különböző típusú akadályokra, és így még tovább tudják fejleszteni tájékozódásukat és hatékonyságukat. Az intralogisztika optimalizálása nagyban hozzájárul a vállalatok versenyképességének növekedéséhez, és az alkalmazottak az így felszabadult idejüket értékesebb feladatokra fordíthatják.

Az MI funkciók nem veszélyeztetik a robot biztonsági protokolljait
Noha a robotikai MI rendszerek kapcsán esetenként felmerül a biztonság kérdése, az elsődleges biztonsági mechanizmusok a robot számára alapvető fontosságúak, és az MI döntései nem tudják felülírni azokat.
Az akadályok körüli biztonságos, ütközésmentes tájékozódáson kívül, a MiR robotok a munkahely általános biztonságához is hozzájárulnak azzal, hogy olyan különböző szállítási feladatokat vesznek át, amelyek az emberek számára fárasztóak és potenciálisan veszélyesek lehetnek. Mindemellett pedig különféle modulok is könnyedén a robotokra szerelhetők, amelyekkel még több feladatot tudnak ellátni. Továbbá a mobil robotok olyan környezetben is képesek dolgozni, amelyek az emberek számára nem lennének egészségesek, például zajos vagy szennyezett területeken.
A MiR robot pedig önmagában véve is biztonságos. Ez azt jelenti, hogy úgy tervezték őket, hogy mindig pontosan tisztában legyenek a környezetükkel.

MI: a következő ipari forradalom mozgatórugója?
A mobil robotok továbbra is együttműködő berendezések lesznek, és az MI-vel a köztük, és az emberek között fennálló szakadék egyre kisebb lesz, miközben az együttműködés és a hatékonyság egyre csak növekedni fog. Az MI fejlődésével beszéden, vagy kézjeleken keresztül egyre természetesebb módon kommunikálhatunk majd a robotokkal. Ebbe beletartozhat az, hogy ha felemeljük a kezünket, a robot képes lesz megállni, fel tudja ismerni azt, ha egy bizonyos helyre mutatunk, vagy ha intünk neki, hogy menjen tovább, vagy éppen kövessen minket. De akár egyszerűen azt is megmondhatjuk majd neki, hogy „ez a folyosó a következő két órában le lesz zárva, használj másik útvonalat addig!”
Noha a mobil robotok a jövőben is vészleállító gombokkal felszerelt, vezérelhető eszközök maradnak, egyre nagyobb önállóságra fognak szert tenni, ami növelni fogja értéküket. Képesek lesznek megérteni, hogyan tudnának javítani a teljesítményükön. Javaslatokat tehetnek például jobb útvonalakra, arra, hogy a nap melyik szakaszában lenne produktívabb egy adott feladatot elvégezni, más robotok munkafolyamatainak még hatékonyabbá tételére, vagy a legmegfelelőbb töltési időpont megtalálására.
Kapcsolódó cikkek
- A Fujitsu mérsékli a vizuális ellenőrzést támogató MI-megoldások költségeit
- Ezek a legnépszerűbb robotikai termékek
- A Fujitsu MI-alapú technológiával automatizálja az orvosi szövegek kódolását
- Tökéletes együttműködés és gyors megtérülés az autonóm mobil robotokkal
- Ipari robotközpont Székesfehérváron
- Bemutatkozott a Decathlon Magyarország első robot munkatársa
- A technológia teszi olcsóbbá és hatékonyabbá a szállítmányozást
- A MiR új szolgáltatása azonnali megtérüléssel jár!
- Ezért automatizálja az intralogisztikáját (AMR-ekkel)
- A rugalmas gripperek biztosítják az automatizálás jövőjét